
این پروژه توضیح می دهد که چگونه یک موتور DC را می توان در جهت جلو یا معکوس با استفاده از یک تلویزیون یا کنترل از راه دور DVD حرکت داد.هدف ساخت یک موتور محرک ساده دو جهته است که از قطار پالس 38 کیلوهرتز مادون قرمز مدوله شده (IR) بدون استفاده از میکروکنترلر یا برنامهنویسی استفاده میکند.
نمونه اولیه نویسنده در شکل 1 نشان داده شده است.

مدار و کار
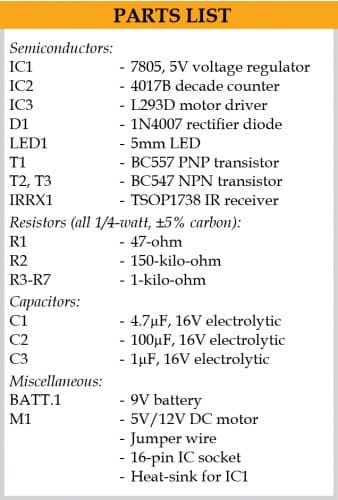
نمودار مدار پروژه در شکل 2 نشان داده شده است. این مدار حول ماژول گیرنده IR TSOP1738 (IRRX1)، شمارنده دهه 4017B (IC2)، درایور موتور L293D (IC3)، ترانزیستور PNP BC557 (T1)، دو ترانزیستور BC547 NPN ساخته شده است. T2 و T3)، منبع تغذیه تنظیم شده 5 ولت (IC1) و باتری 9 ولت.
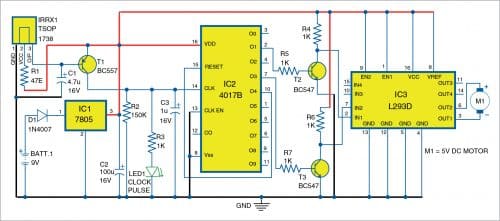
باتری 9 ولتی از طریق دیود D1 به تنظیم کننده ولتاژ 7805 متصل می شود تا 5 ولت DC مورد نیاز پروژه را تولید کند.خازن C2 (100μF، 16V) برای رد ریپل استفاده می شود.
در شرایط عادی، پایه خروجی 3 ماژول IR IRRX1 در حد منطقی بالا است، به این معنی که ترانزیستور T1 متصل به آن قطع است و بنابراین ترمینال کلکتور آن در پایین منطقی قرار دارد.کلکتور T1 پالس ساعت شمارنده دهه IC2 را به حرکت در می آورد.
با اشاره ریموت به سمت ماژول IR و فشار دادن هر کلید، ماژول پالس های IR 38 کیلوهرتز را از ریموت کنترل دریافت می کند.این پالس ها در کلکتور T1 معکوس می شوند و به پایه ورودی ساعت 14 شمارنده دهه IC2 داده می شوند.
پالس های IR ورودی، شمارنده دهه را با همان سرعت (38 کیلوهرتز) افزایش می دهند، اما به دلیل وجود فیلتر RC (R2=150k و C3=1μF) در پایه ورودی ساعت 14 IC2، قطار پالس ها به صورت یک پالس در شمارنده.بنابراین، با فشار دادن هر کلید، شمارنده تنها با یک شمارش پیشرفت می کند.
هنگامی که کلید کنترل از راه دور آزاد می شود، خازن C3 از طریق مقاومت R2 تخلیه می شود و خط ساعت صفر می شود.بنابراین هر بار که کاربر کلیدی را روی کنترل از راه دور فشار داده و رها می کند، شمارنده یک پالس در ورودی ساعت خود دریافت می کند و LED1 برای تأیید دریافت پالس می درخشد.
در حین کار می تواند پنج احتمال وجود داشته باشد:
مورد 1
هنگامی که کلید کنترل از راه دور فشار داده می شود، اولین پالس می رسد و خروجی O0 شمارنده دهه (IC2) بالا می رود در حالی که پایه های O1 تا O9 پایین هستند، به این معنی که ترانزیستورهای T2 و T3 در حالت قطع هستند.کلکتورهای هر دو ترانزیستور توسط مقاومت های 1 کیلو اهم (R4 و R6) به حالت بالا کشیده می شوند، بنابراین هر دو پایانه ورودی IN1 و IN2 درایور موتور L293D (IC3) بالا می شوند.در این مرحله موتور در حالت خاموش است.
مورد 2
هنگامی که یک کلید دوباره فشار داده می شود، پالس دوم که به خط CLK می رسد شمارنده را یک بار افزایش می دهد.یعنی وقتی پالس دوم می رسد، خروجی O1 IC2 بالا می رود، در حالی که خروجی های باقی مانده کم هستند.بنابراین، ترانزیستور T2 هدایت می شود و T3 قطع می شود.به این معنی که ولتاژ در کلکتور T2 پایین می آید (IN1 از IC3) و ولتاژ در کلکتور T3 زیاد می شود (IN2 از IC3) و ورودی های IN1 و IN2 IC3 درایور موتور به ترتیب 0 و 1 می شوند.در این حالت موتور در جهت جلو می چرخد.
مورد 3
هنگامی که یک کلید یک بار دیگر فشار داده می شود، پالس سوم که به خط CLK می رسد شمارنده را دوباره یک بار افزایش می دهد.بنابراین خروجی O2 IC2 بالا می رود.از آنجایی که هیچ چیز به پین O2 متصل نیست و پایه های خروجی O1 و O3 کم هستند، بنابراین هر دو ترانزیستور T2 و T3 به حالت قطع می روند.
پایانه های جمع کننده هر دو ترانزیستور توسط مقاومت های 1 کیلو اهم R4 و R6 به حالت بالا کشیده می شوند، که به این معنی است که ترمینال های ورودی IN1 و IN2 IC3 زیاد می شوند.در این مرحله موتور دوباره در حالت خاموش است.
مورد 4
هنگامی که یک کلید یک بار دیگر فشار داده می شود، پالس چهارم که به خط CLK می رسد، شمارنده را برای بار چهارم یک بار افزایش می دهد.اکنون خروجی O3 IC2 بالا می رود، در حالی که خروجی های باقی مانده کم هستند، بنابراین ترانزیستور T3 هدایت می کند.یعنی ولتاژ در کلکتور T2 زیاد می شود (IN1 از IC3) و ولتاژ در کلکتور T3 کم می شود (IN2 از IC3).بنابراین ورودی های IN1 و IN2 IC3 به ترتیب در سطوح 1 و 0 قرار دارند.در این حالت موتور در جهت معکوس می چرخد.
مورد 5
هنگامی که یک کلید برای بار پنجم فشار داده می شود، پالس پنجم که به خط CLK می رسد شمارنده را یک بار دیگر افزایش می دهد.از آنجایی که O4 (پایه 10 IC2) به پین ورودی 15 IC2 Reset سیمی شده است، فشار دادن برای پنجمین بار IC شمارنده دهه را به حالت روشن و تنظیم مجدد با O0 بالا برمی گرداند.
بنابراین، مدار به عنوان یک درایور موتور دو جهته عمل می کند که با یک کنترل از راه دور مادون قرمز کنترل می شود.
ساخت و آزمایش
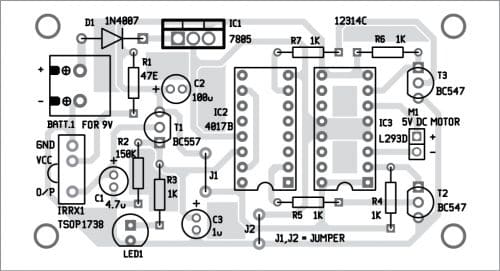
مدار را می توان روی یک Veroboard یا PCB که طرح اندازه واقعی آن در شکل 3 نشان داده شده است مونتاژ کرد. طرح اجزای PCB در شکل 4 نشان داده شده است.
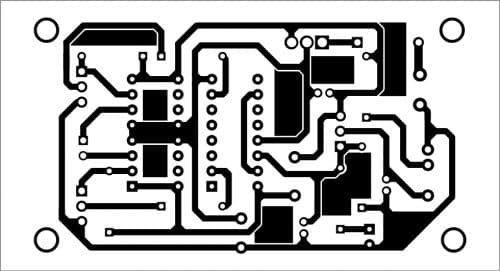
دانلود پی دی اف PCB و طرح کامپوننت:اینجا کلیک کنید
پس از مونتاژ مدار، باتری 9 ولت را در BATT.1 وصل کنید.برای عملیات به جدول حقیقت (جدول 1) مراجعه کنید و مراحل شرح داده شده در مورد 1 تا مورد 5 در بالا را دنبال کنید.
ویرایش شده توسط لیزا
زمان ارسال: سپتامبر 29-2021